Working with submodels¶
In this notebook we will use pycollimator to optimize a PID controller for the cart pole model that you can find in our public projects. This will demonstrate how to download a submodel and use it in a model defined locally. Finally we will upload the resulting controller (as a submodel) and full model back to the Dashboard.
Setup¶
CartPole project¶
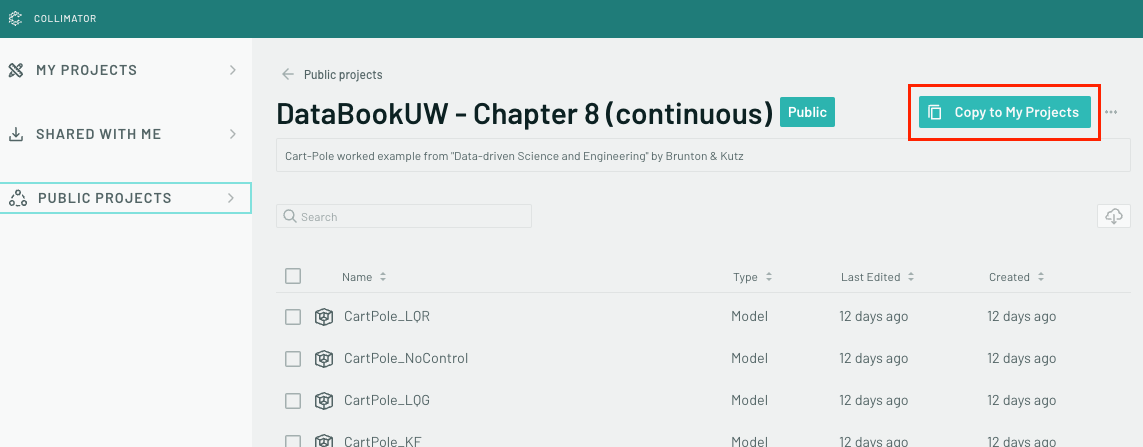
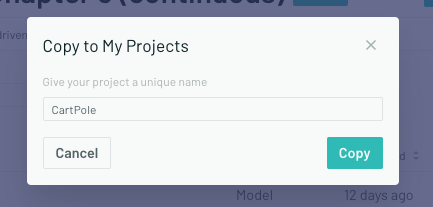
First, head to the DataBookUW - Chapter 8 (continuous) project page on the Dashboard and copy it to your projects with the name CartPole.
Connecting to the Collimator application¶
To interact with the Collimator cloud application using the pycollimator package, you must first generate an API key from the Dashboard:
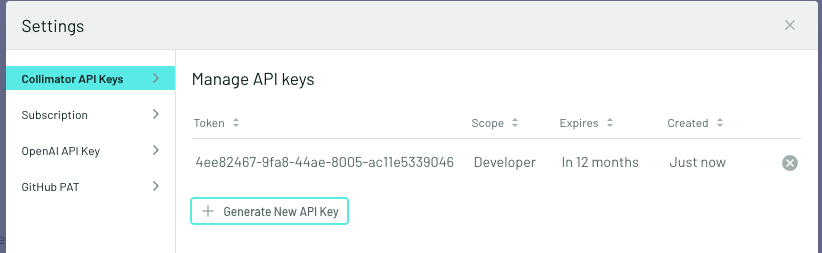
When you generate the key, it is automatically copied to your system clipboard for you to paste into your code.
Note: If you overwrite your clipboard contents after leaving the API Keys tab, you will no longer be able to see or copy your key and will have to generate a new one.
Import dashboard from the collimator package, and paste your API key as the argument to the set_api_token call at the beginning of your code:
from functools import partial
import collimator
from collimator import DiagramBuilder, dashboard, library, simulate
from collimator.dashboard.serialization.model_json import Configuration, ParameterDefinition, Workspace, WorkspaceDataFile
from collimator.simulation import SimulatorOptions
from collimator.models.cartpole import animate_cartpole
import jax
import jax.numpy as jnp
from jax.scipy.optimize import minimize
import matplotlib.pyplot as plt
import numpy as np
dashboard.api.set_api_token("<YOUR_API_TOKEN>")
Note that you may also set the API token through the environment variable COLLIMATOR_API_TOKEN.
Downloading the project¶
collimator.set_backend("jax") # Need for autodiff
project = dashboard.project.get_project_by_name("CartPole")
collimator.dashboard.project:INFO Downloading project fbe5968d-9a1f-487d-8a54-e422259962aa... collimator.dashboard.project:INFO Project dir: /Users/jpeg/code/collimator-ai/collimator/src/lib/wildcat/notebooks/examples collimator.dashboard.project:INFO Registering submodel NoiseFromCovariance collimator.dashboard.project:INFO Registering submodel LQRController collimator.dashboard.project:INFO Registering submodel KalmanFilter collimator.dashboard.project:INFO Registering submodel Impulse collimator.dashboard.project:INFO Registering submodel CartPole collimator.dashboard.project:INFO Evaluating WorkspaceDataFile(file_name='cartpole_init.py') collimator.dashboard.project:INFO Evaluating WorkspaceDataFile(file_name='cartpole_init.py') collimator.dashboard.project:INFO Evaluating WorkspaceDataFile(file_name='cartpole_init.py') collimator.dashboard.project:INFO Evaluating WorkspaceDataFile(file_name='cartpole_init_lqg.py')
Submodel for PID controller¶
For demonstration purposes we will create a simple submodel that only contains a PIDDiscrete block.
def make_pid_controller(instance_name, parameters, dt=0.1):
builder = DiagramBuilder()
pid = library.PIDDiscrete(name="PID", dt=dt, **parameters)
builder.add(pid)
builder.export_input(pid.input_ports[0])
builder.export_output(pid.output_ports[0])
return builder.build(name=instance_name)
project.save_submodel(
make_pid_controller,
"PIDController",
[
ParameterDefinition(name="kp", default_value="0.0"),
ParameterDefinition(name="ki", default_value="0.0"),
ParameterDefinition(name="kd", default_value="0.0"),
],
)
# instantiate the submodel so that we can use it in our local model.
controller = project.create_submodel_instance(
"PIDController", "PIDControllerInstance",
instance_parameters={"kp": 0.0, "ki": 0.0, "kd": 0.0}
)
collimator.dashboard.project:INFO Creating submodel 'PIDController' (1cd90e06-531c-405c-9374-2bbf80855616)
Model¶
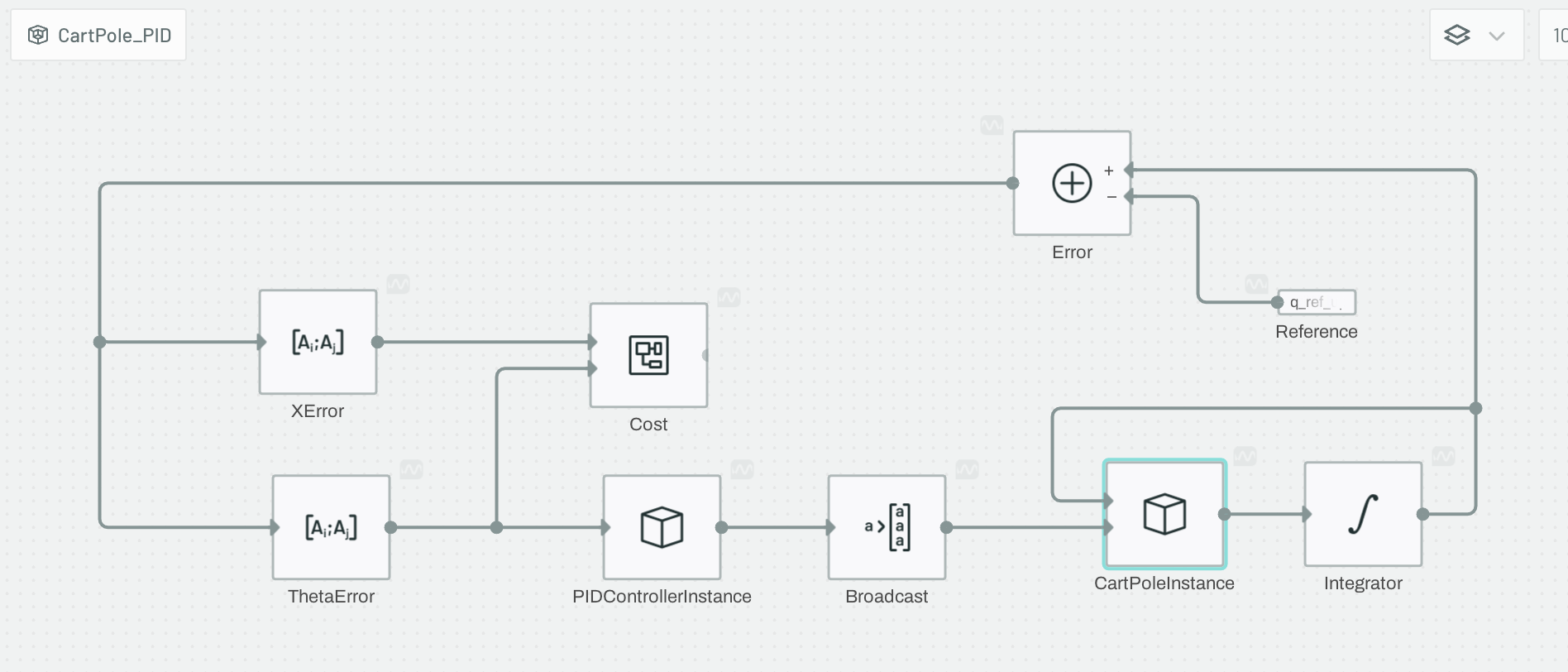
The CartPole project contains a CartPole submodel that we will use in our model. The following code builds a model that consists of the cart pole, the PID controller, error calculation blocks and a cost function for optimization.
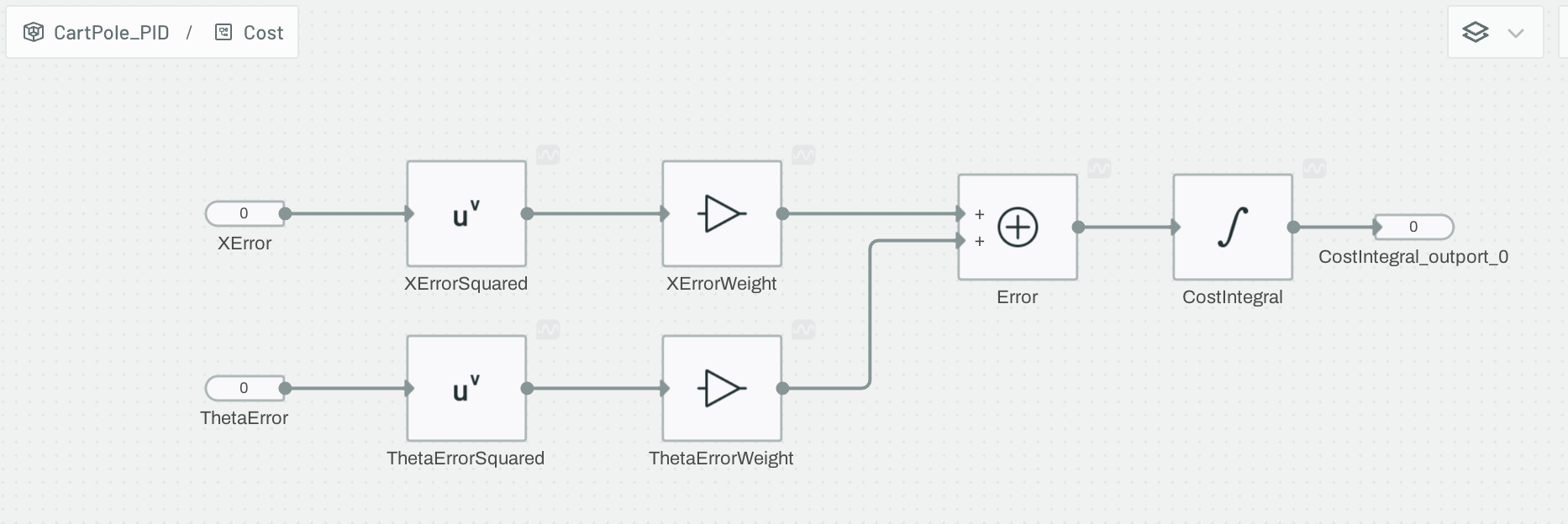
Our cost function simply calculates a weighted sum of the squared error of the angle theta and the position x and passes it to an Integrator block. Note that the reference position q_ref_up is defined in the init script cartpole_init.py.
def make_cost(x_weight=1.0, theta_weight=1.0):
"""Integral of squared error."""
builder = DiagramBuilder()
x_error = builder.add(library.IOPort(name="XError"))
theta_error = builder.add(library.IOPort(name="ThetaError"))
x_error_squared = builder.add(library.Power(2, name="XErrorSquared"))
theta_error_squared = builder.add(library.Power(2, name="ThetaErrorSquared"))
x_error_weight = builder.add(library.Gain(x_weight, name="XErrorWeight"))
theta_error_weight = builder.add(library.Gain(theta_weight, name="ThetaErrorWeight"))
error = builder.add(library.Adder(2, operators="++", name="Error"))
cost_integral = builder.add(library.Integrator(0.0, name="CostIntegral"))
builder.connect(x_error.output_ports[0], x_error_squared.input_ports[0])
builder.connect(theta_error.output_ports[0], theta_error_squared.input_ports[0])
builder.connect(x_error_squared.output_ports[0], x_error_weight.input_ports[0])
builder.connect(theta_error_squared.output_ports[0], theta_error_weight.input_ports[0])
builder.connect(x_error_weight.output_ports[0], error.input_ports[0])
builder.connect(theta_error_weight.output_ports[0], error.input_ports[1])
builder.connect(error.output_ports[0], cost_integral.input_ports[0])
builder.export_input(x_error.input_ports[0], "XError")
builder.export_input(theta_error.input_ports[0], "ThetaError")
builder.export_output(cost_integral.output_ports[0], "cost")
return builder.build(name="Cost")
def make_diagram(controller, cart_pole, cost, theta0, q_ref_up, name):
builder = DiagramBuilder()
builder.add(controller)
builder.add(cart_pole)
integrator = builder.add(library.Integrator([0, theta0, 0, 0], name="Integrator"))
error = builder.add(library.Adder(2, operators="+-", name="Error"))
reference = builder.add(library.Constant(q_ref_up, name="Reference"))
# output of cart_pole is [dot_x, dot_theta, ddot_x, ddot_theta]
# for this example we are only interested in dot_x and dot_theta
x_error = builder.add(library.Slice("0", name="XError"))
theta_error = builder.add(library.Slice("1", name="ThetaError"))
# convert scalar to vector of shape (1,) - CartPole input expects a vector
broadcast = builder.add(library.ScalarBroadcast(1, 0, name="Broadcast"))
# cost function used for optimization
cost_function = builder.add(cost)
builder.connect(controller.output_ports[0], broadcast.input_ports[0])
builder.connect(broadcast.output_ports[0], cart_pole.input_ports[1])
builder.connect(cart_pole.output_ports[0], integrator.input_ports[0])
builder.connect(integrator.output_ports[0], error.input_ports[0])
builder.connect(integrator.output_ports[0], cart_pole.input_ports[0])
builder.connect(reference.output_ports[0], error.input_ports[1])
builder.connect(error.output_ports[0], x_error.input_ports[0])
builder.connect(error.output_ports[0], theta_error.input_ports[0])
builder.connect(theta_error.output_ports[0], controller.input_ports[0])
builder.connect(x_error.output_ports[0], cost_function.input_ports[0])
builder.connect(theta_error.output_ports[0], cost_function.input_ports[1])
return builder.build(name=name)
def build_model(controller):
cart_pole = project.create_submodel_instance("CartPole", "CartPoleInstance")
q_ref_up = project.init_scripts["cartpole_init.py"].get_variable("q_ref_up")
cost_function = make_cost(x_weight=0.1, theta_weight=1.0)
theta0 = np.pi + 0.1
return make_diagram(
controller, cart_pole, cost_function, theta0, q_ref_up, name="CartPole_PID"
)
diagram = build_model(controller)
Let's save the diagram to the Dashboard and check the resulting block diagrams in the UI.
project.save_model(
diagram,
configuration=Configuration(
workspace=Workspace(init_scripts=[WorkspaceDataFile(file_name= "cartpole_init.py")])
),
)
collimator.dashboard.project:INFO Updating submodel 'PIDController' (1cd90e06-531c-405c-9374-2bbf80855616) collimator.dashboard.project:INFO Updating submodel 'CartPole' (c5ed39cc-b1b4-49c8-aeca-d390b70dd70a) collimator.dashboard.project:INFO Creating model 'CartPole_PID' (5827f0e3-d67f-4f8a-a21e-58e1ecc0db81)
'5827f0e3-d67f-4f8a-a21e-58e1ecc0db81'
Optimization¶
We will use the popular scipy library for optimization.
def optimize_pid(diagram):
t_span = (0.0, 2.0)
options = SimulatorOptions(
enable_autodiff=True,
rtol=1e-6,
atol=1e-8,
)
controller = diagram["PIDControllerInstance"]["PID"]
cost_integral = diagram["Cost"]["CostIntegral"]
@jax.jit
def forward(k, context):
controller_context = context[controller.system_id].with_parameters(
{"kp": k[0], "ki": k[1], "kd": k[2]}
)
context = context.with_subcontext(controller.system_id, controller_context)
results = simulate(diagram, context, t_span, options=options)
return results.context[cost_integral.system_id].continuous_state
k0 = jnp.array([1.0, 0.0, 0.0])
context = diagram.create_context()
forward(k0, context)
res = minimize(partial(forward, context=context), k0, method="BFGS")
return res.x
opt_params = optimize_pid(diagram)
print(opt_params)
collimator:INFO max_major_steps=100 based on smallest discrete period=0.1 collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=100, ode_solver_method=default, rtol=1e-06, atol=1e-08, min_minor_step_size=None, max_minor_step_size=None, max_minor_steps_per_major_step=None, zc_bisection_loop_count=40, save_time_series=False, recorded_signals=0, return_context=True), DiffraxSolver(system=Diagram(CartPole_PID, 9 nodes), rtol=1e-06, atol=1e-08, max_steps=4096, max_step_size=None, min_step_size=None, method='default', save_steps=True, return_step_interpolant=False) collimator:INFO max_major_steps=100 based on smallest discrete period=0.1 collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=100, ode_solver_method=default, rtol=1e-06, atol=1e-08, min_minor_step_size=None, max_minor_step_size=None, max_minor_steps_per_major_step=None, zc_bisection_loop_count=40, save_time_series=False, recorded_signals=0, return_context=True), DiffraxSolver(system=Diagram(CartPole_PID, 9 nodes), rtol=1e-06, atol=1e-08, max_steps=4096, max_step_size=None, min_step_size=None, method='default', save_steps=True, return_step_interpolant=False)
[-305.57495084 -102.21876708 -94.38173305]
Finally let's input the optimized gains in our model and check the results:
def show_results(diagram, kp, ki, kd):
context = diagram.create_context()
controller = diagram["PIDControllerInstance"]["PID"]
integrator = diagram["Integrator"]
controller_context = context[controller.system_id].with_parameters(
{"kp": kp, "ki": ki, "kd": kd}
)
context = context.with_subcontext(controller.system_id, controller_context)
results = simulate(
diagram,
context,
(0.0, 10.0),
recorded_signals={
"x": integrator.output_ports[0],
"theta_error": diagram["ThetaError"].output_ports[0],
},
)
plt.figure(figsize=(7, 2))
plt.plot(results.time, results.outputs["theta_error"], label='theta_error')
plt.legend(loc='upper right')
plt.xlabel("$t$")
plt.grid()
plt.show()
x = results.outputs["x"]
return animate_cartpole(results.time, x[:, 0], x[:, 1])
show_results(diagram, opt_params[0], opt_params[1], opt_params[2])
collimator:INFO max_major_steps=198 based on smallest discrete period=0.1 collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=198, ode_solver_method=default, rtol=0.001, atol=1e-06, min_minor_step_size=None, max_minor_step_size=None, max_minor_steps_per_major_step=None, zc_bisection_loop_count=40, save_time_series=True, recorded_signals=2, return_context=True), DiffraxSolver(system=Diagram(CartPole_PID, 9 nodes), rtol=0.001, atol=1e-06, max_steps=4096, max_step_size=None, min_step_size=None, method='default', save_steps=True, return_step_interpolant=False)

Upload the optimized model to the Dashboard¶
In order to save the optimized model, we need to create a new instance of the PID controller submodel with the optimized gains and build a new model from that:
controller = project.create_submodel_instance(
"PIDController", "PIDControllerInstance",
instance_parameters={"kp": opt_params[0], "ki": opt_params[1], "kd": opt_params[2]}
)
optimized_diagram = build_model(controller)
project.save_model(
optimized_diagram,
configuration=Configuration(
workspace=Workspace(init_scripts=[WorkspaceDataFile(file_name= "cartpole_init.py")])
),
)
collimator.dashboard.project:INFO Updating submodel 'PIDController' (1cd90e06-531c-405c-9374-2bbf80855616) collimator.dashboard.project:INFO Updating submodel 'CartPole' (c5ed39cc-b1b4-49c8-aeca-d390b70dd70a) collimator.dashboard.project:INFO Updating model 'CartPole_PID' (5827f0e3-d67f-4f8a-a21e-58e1ecc0db81)
'5827f0e3-d67f-4f8a-a21e-58e1ecc0db81'