Getting started with Collimator simulations¶
The Collimator Python package is a comprehensive tool for modeling and simulating hybrid dynamical systems. It is designed to be familiar for users of other simulation tools like Simulink and Modelica, but with the added benefit of being able to use Python's extensive scientific computing ecosystem. It is also based on JAX, which allows for fast simulation via just-in-time (JIT) compilation, automatic differentiation, and scaling to high-performance computing resources, all with a familiar NumPy-like numerical interface.
Putting it all together allows for a modern, flexible, and powerful simulation tool that can be used for a wide variety of applications from classical controller design to cutting-edge data-driven optimization and machine learning applications. This tutorial will walk through the basics of using Collimator to simulate a simple hybrid dynamical system.
import collimator
from collimator import library
import numpy as np
import matplotlib.pyplot as plt
Constructing block diagrams¶
One of the core ideas of the Collimator modeling framework is constructing complex models out of simple building blocks connected together into composite models via the "block diagram" paradigm familiar from control theory. The Collimator package provides a number of "primitive" blocks, including integrators, gains, and summing junctions, and more complex blocks like neural networks and model-predictive controllers. These blocks can be connected together to form composable diagrams, which can then be simulated using the simulate function.
As a starting point, let's consider a simple model of a mass-spring-damper system. This system is described by the following differential equation:
$$ m \ddot{x} + b \dot{x} + k x = u, $$
where $m$ is the mass, $b$ is the damping coefficient, $k$ is the spring constant, and $u$ is the applied force. For the sake of simplicity, let's take the mass $m$ to be 1 kg and the damping coefficient $b$ to be zero. The equations of motion then simplify to:
$$ \ddot{x} = u - k x. $$
We can construct a block diagram representation of this system using simple primitive blocks in Collimator:
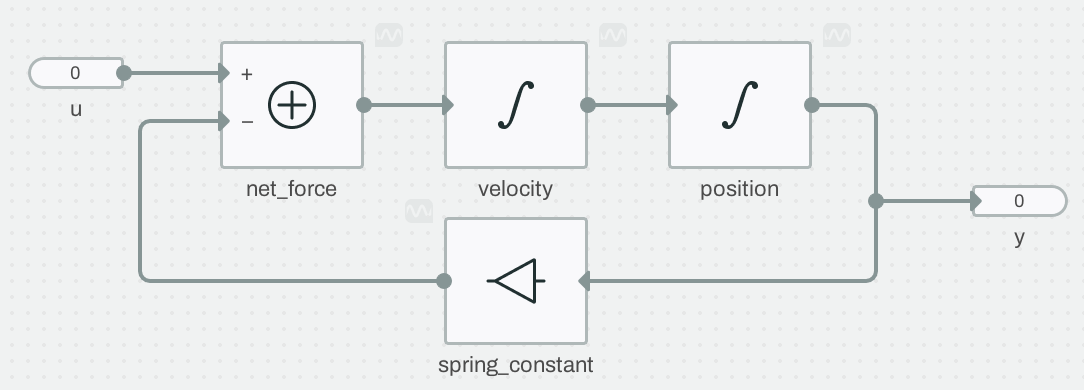
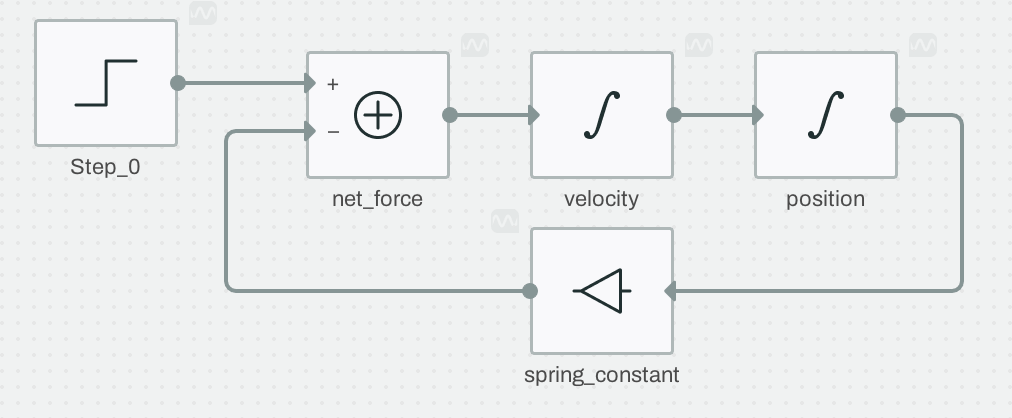
To start off, we'll skip the "diagram-level" input port "u" and output port "y" and just add a step input to the system like this:
We can construct this block diagram using the DiagramBuilder class, which has a simple interface:
add(block): add a block to the diagram and return a reference to the blockconnect(output_port, input_port): connect an output port to an input portbuild(): construct the diagram and return a reference to itexport_input(input_port): export an input port to the diagram levelexport_output(output_port): export an output port to the diagram level
We'll return to the port "exporting" methods shortly. For now, let's start by constructing the block diagram. It is often a good practice to put the diagram construction code in a function, which allows us to easily reuse the diagram and makes it less likely for stray global variables to cause problems.
def make_oscillator(x0, v0, k):
# Create a diagram builder
builder = collimator.DiagramBuilder()
# Add all the blocks to the diagram
position = builder.add(library.Integrator(x0, name="position"))
velocity = builder.add(library.Integrator(v0, name="velocity"))
spring_constant = builder.add(library.Gain(k, name="spring_constant"))
net_force = builder.add(library.Adder(2, operators="+-", name="net_force"))
Step_0 = builder.add(
library.Step(start_value=0.0, end_value=1.0, step_time=1.0, name="Step_0")
)
# Connect the blocks
builder.connect(position.output_ports[0], spring_constant.input_ports[0])
builder.connect(Step_0.output_ports[0], net_force.input_ports[0])
builder.connect(spring_constant.output_ports[0], net_force.input_ports[1])
builder.connect(net_force.output_ports[0], velocity.input_ports[0])
builder.connect(velocity.output_ports[0], position.input_ports[0])
# Build the diagram
diagram = builder.build(name="oscillator")
return diagram
# Define some parameters
x0 = 0.0 # Initial position [m]
v0 = 0.0 # Initial velocity [m/s]
k = 10.0 # Spring constant [N/m]
# Create the block diagram
diagram = make_oscillator(x0, v0, k)
# Show the blocks in the diagram
diagram.pprint()
# We can recover the blocks by indexing into the diagram by name
position = diagram["position"]
velocity = diagram["velocity"]
spring_constant = diagram["spring_constant"]
Step_0 = diagram["Step_0"]
net_force = diagram["net_force"]
|-- oscillator
|-- position(id=1)
|-- velocity(id=2)
|-- spring_constant(id=3)
|-- net_force(id=4)
|-- Step_0(id=5)
Next let's simulate the system. To do this, we'll use the simulate function, which takes as input the system model and a "context" object containing the time, state, and parameters of the system. First, let's take a quick look at the context. We can create a context that matches the system using the .create_context() method.
The structure of the context is similar to a dictionary indexed by the "System ID", a unique identifier for each block in the diagram. Each block has a "state" and "parameters" entry, which are dictionaries containing the state and parameters of the block, respectively. The "root" context also contains a "time" entry, which is a scalar value representing the current time of the system.
context = diagram.create_context()
print(f"time: {context.time}")
# Extract the context for the "x" integrator block
x_context = context[position.system_id]
print(f"position state: {x_context.state}")
# Extract the context for the gain block
k_context = context[spring_constant.system_id]
print(f"gain state: {k_context.state}") # No state
print(f"gain parameters: {k_context.parameters}")
time: 0.0
position state: LeafState(xc=0.0)
gain state: LeafState()
gain parameters: {'gain': Array(10., dtype=float64, weak_type=True)}
The "state" part of the context contains several components, including discrete and continuous states, denoted xd and xc as shorthand in the print statements. This part of the system only uses the "continuous" state, so named because it evolves continuously in time as prescribed by the ODE. Each integrator has one continuous state component, so the full continuous state of the system has two components:
context.continuous_state
[Array(0., dtype=float64, weak_type=True), Array(0., dtype=float64, weak_type=True)]
The context is immutable, so for instance if we were to try to change the initial condition by assigning to the continuous state we would get an error:
try:
x_context.continuous_state = 1.0
except Exception as e:
print(e)
cannot assign to field 'continuous_state'
Instead, we can update and return a new copy of the context using methods like with_continuous_state:
updated_context = x_context.with_continuous_state(1.0)
print(updated_context.continuous_state)
# The original is unchanged
print(x_context.continuous_state)
# The diagram context is also unchanged
print(context.continuous_state)
1.0 0.0 [Array(0., dtype=float64, weak_type=True), Array(0., dtype=float64, weak_type=True)]
Next let's set up and run a simulation using the simulate function:
context = diagram.create_context()
recorded_signals = {
"u": Step_0.output_ports[0],
"F": net_force.output_ports[0],
"x": position.output_ports[0],
"v": velocity.output_ports[0],
}
t0, tf = 0.0, 10.0
results = collimator.simulate(
diagram,
context,
(t0, tf),
recorded_signals=recorded_signals,
options=collimator.SimulatorOptions(rtol=1e-6, atol=1e-8),
)
fig, axs = plt.subplots(3, 1, figsize=(7, 5), sharex=True)
axs[0].plot(results.time, results.outputs["x"])
axs[0].set_ylabel("position [m]")
axs[1].plot(results.time, results.outputs["v"])
axs[1].set_ylabel("velocity [m/s]")
axs[2].plot(results.time, results.outputs["u"], label="input")
axs[2].plot(results.time, results.outputs["F"], label="net force")
axs[2].legend(loc="lower right")
axs[2].set_ylabel("force [N]")
collimator:INFO max_major_steps=100 based on smallest discrete period=inf
collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=100, ode_solver_method=default, rtol=1e-06, atol=1e-08, min_minor_step_size=None, max_minor_step_size=None, zc_bisection_loop_count=40, save_time_series=True, recorded_signals=4, return_context=True), Dopri5Solver(system=Diagram(oscillator, 5 nodes), rtol=1e-06, atol=1e-08, max_steps=4096, max_step_size=None, min_step_size=None, method='default', enable_autodiff=False)
Text(0, 0.5, 'force [N]')

This code should be mostly self-explanatory except for the recorded_signals dictionary. Models can grow to encompass many blocks, each of which may have several ports, while in many practical cases there may only be a few such signals of particular interest. To avoid having to record all signals, the simulate function takes a dictionary of "signals" (typically output ports) that should be recorded. The keys are arbitrary names for the signals (here we chose "x" and "v"), and the values are references to the block ports.
Finally, the simulate function returns an object containing various results, including the time series and the recorded signals.
Adding a controller¶
Next let's add in some feedback control to get the system to do what we want. We could add the controller logic to the same diagram, but this quickly leads to an unmanageable number of blocks and prevents creating "modular" systems on which we can test various controllers, etc.
Instead, it's often better to break the full model into sub-diagrams which represent logical components of the system. In this example, we can create a reference-tracking PID controller with a top-level diagram that looks like this:
![]()
The "plant" is a sub-diagram that we've (almost) already seen how to construct:
The last thing we need to cover is the way that the sub-diagram becomes a "block" in the top-level diagram. We make this happen by "exporting" ports before constructing the diagram. The export_input and export_output methods of the DiagramBuilder class allow us to export input and output ports, respectively, to the diagram level. This allows us to connect the sub-diagram to other blocks in the top-level diagram.
Let's see how this works in practice. First, let's construct the plant sub-diagram:
def make_plant(x0=0.0, v0=0.0, k=10.0, name="plant"):
builder = collimator.DiagramBuilder()
# Add all the blocks to the diagram
position = builder.add(library.Integrator(x0, name="position"))
velocity = builder.add(library.Integrator(v0, name="velocity"))
spring_constant = builder.add(library.Gain(k, name="spring_constant"))
net_force = builder.add(library.Adder(2, operators="+-", name="net_force"))
# Connect the blocks
builder.connect(position.output_ports[0], spring_constant.input_ports[0])
builder.connect(spring_constant.output_ports[0], net_force.input_ports[1])
builder.connect(net_force.output_ports[0], velocity.input_ports[0])
builder.connect(velocity.output_ports[0], position.input_ports[0])
# Export the input and output ports as diagram ports
builder.export_input(net_force.input_ports[0], "u")
builder.export_output(position.output_ports[0], "y")
# Build the diagram
return builder.build(name=name)
We can use this diagram just like a "primitive" block in the top-level diagram. For the feedback controller, we'll use a simple discrete-time PID controller that updates at a rate of dt seconds.
We don't have to do any further work to make sure these updates are handled properly; the simulate function will automatically stop time integration and handle the discrete-time updates for us. We'll explore discrete and hybrid systems further in future tutorials.
builder = collimator.DiagramBuilder() # Create a fresh diagram builder
dt = 0.1 # Discrete time step of the PID controller [s]
kp = 10.0 # Proportional gain
ki = 20.0 # Integral gain
kd = 12.0 # Derivative gain
x0 = 1.0 # Initial position [m]
v0 = 0.0 # Initial velocity [m/s]
# Add the blocks to the top-level diagram
plant = builder.add(make_plant(name="plant", x0=x0, v0=v0))
reference_signal = builder.add(
library.Step(start_value=0.0, end_value=1.0, step_time=5.0, name="reference_signal")
)
tracking_error = builder.add(library.Adder(2, operators="-+", name="tracking_error"))
neg_one = builder.add(library.Gain(-1.0, name="neg_one"))
controller = builder.add(
library.PIDDiscrete(kp=kp, ki=ki, kd=kd, dt=dt, name="controller")
)
# Connect the blocks
builder.connect(reference_signal.output_ports[0], tracking_error.input_ports[0])
builder.connect(plant.output_ports[0], tracking_error.input_ports[1])
builder.connect(tracking_error.output_ports[0], controller.input_ports[0])
builder.connect(controller.output_ports[0], neg_one.input_ports[0])
builder.connect(neg_one.output_ports[0], plant.input_ports[0])
# Create the diagram
diagram = builder.build(name="root")
# Show the blocks in the diagram. Note that this time the blocks in the "plant"
# appear nested inside the subdiagram.
diagram.pprint()
|-- root
|-- plant
|-- position(id=7)
|-- velocity(id=8)
|-- spring_constant(id=9)
|-- net_force(id=10)
|-- reference_signal(id=12)
|-- tracking_error(id=13)
|-- neg_one(id=14)
|-- controller(id=15)
Finally, we can simulate it just as we did for the plant-only diagram:
context = diagram.create_context()
recorded_signals = {
"xr": reference_signal.output_ports[0],
"u": diagram["neg_one"].output_ports[0],
"y": diagram["plant"].output_ports[0],
"F": diagram["plant"]["net_force"].output_ports[0],
}
t0, tf = 0.0, 10.0
results = collimator.simulate(
diagram,
context,
(t0, tf),
recorded_signals=recorded_signals,
options=collimator.SimulatorOptions(rtol=1e-6, atol=1e-8),
)
fig, axs = plt.subplots(2, 1, figsize=(7, 3.5), sharex=True)
axs[0].plot(results.time, results.outputs["y"], label="position")
axs[0].plot(results.time, results.outputs["xr"], label="reference")
axs[0].legend(loc="lower right")
axs[0].set_ylabel("position [m]")
axs[1].step(results.time, results.outputs["u"], where="post", label="input")
axs[1].step(results.time, results.outputs["F"], where="post", label="net force")
axs[1].legend(loc="lower right")
axs[1].set_ylabel("force [N]")
collimator:INFO max_major_steps=198 based on smallest discrete period=0.1 collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=198, ode_solver_method=default, rtol=1e-06, atol=1e-08, min_minor_step_size=None, max_minor_step_size=None, zc_bisection_loop_count=40, save_time_series=True, recorded_signals=4, return_context=True), Dopri5Solver(system=Diagram(root, 5 nodes), rtol=1e-06, atol=1e-08, max_steps=4096, max_step_size=None, min_step_size=None, method='default', enable_autodiff=False)
Text(0, 0.5, 'force [N]')

The controlled system damps out the natural oscillations and tracks the reference signal through the step change (albeit with large and undesirable variability in the control signal).
Let's recap. We've seen how to quickly construct block diagram models similar to those in Simulink or Modelica using the built-in blocks available from library, including:
GainIntegratorAdderStepPIDDiscrete
To see a full list of built-in blocks, see the documentation here.
These blocks can be connected together to form diagrams using the DiagramBuilder class, which has a simple interface:
add(block): add a block to the diagram and return a reference to the blockconnect(output_port, input_port): connect an output port to an input portbuild(): construct the diagram and return a reference to itexport_input(input_port): export an input port to the diagram levelexport_output(output_port): export an output port to the diagram level
These diagrams can be treated as blocks themselves in other diagrams, allowing for modular construction of complex systems.
Once the model has been constructed, it can be simulated using the simulate function, which takes as input the system model and a "context" object containing the time, state, and parameters of the system. The simulate function returns an object containing various results, including the time series and specified recorded signals.
Graphical modeling¶
It quickly becomes tedious and error-prone to construct large, complex models from primitive blocks by adding them one by one and manually connecting them in code. One alternative is to write custom blocks that lump these primitive operations together; we will cover this in the next tutorial.
An alternative is to use a graphical modeling tool to construct the block diagram. Collimator also provides a web-based modeling tool that allows you to construct block diagrams using an intuitive graphical interface. These models can be simulated in the app itself, or exported to Python code that can be further analyzed or simulated locally just as we have done here.
Understanding the structure of models¶
The interface we've just explored scales from models with a single self-contained "block" up to large, complex models with many interconnected blocks and nested subdiagrams. To understand why this works, it's helpful to understand a little about the way the modeling framework is structured.
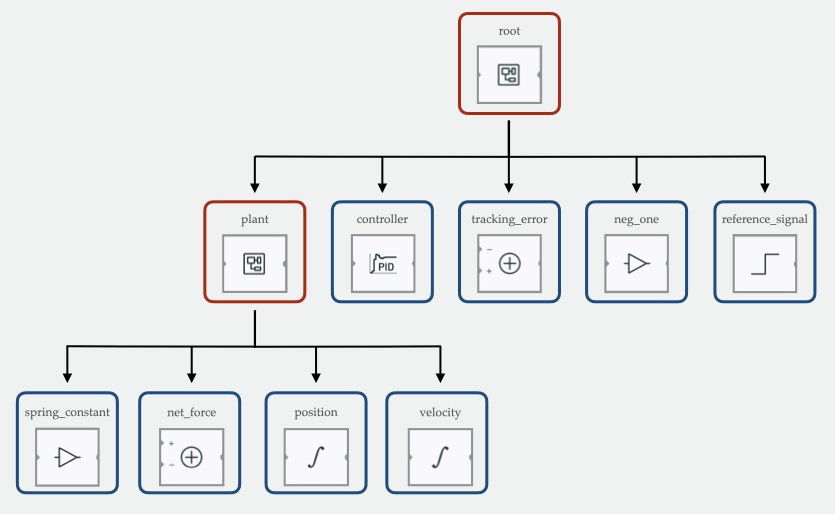
All models in Collimator are represented by a "system" object. There are two main types of systems: "leaf" systems, like the primitive Gain and Integrator blocks, and "diagram" systems, which are composed of other systems. Together, the system object is tree-structured, with the leaf systems as the leaves and the diagram systems as the internal nodes.
For example, the diagram we constructed above is represented by the following tree structure, with the leaf systems in blue and the diagrams in red:
By design of the "system" class hierarchy, all blocks have a common interface that allows them to be treated uniformly from the perspective of simulation and other kinds of analysis. For example, all systems support methods including:
eval_time_derivatives: compute the time derivatives of the continuous component of the system statehandle_discrete_updates: compute the periodic updates to the discrete components of the system statehandle_zero_crossing_updates: compute the "reset map" updates to the system state that occur when a zero-crossing event is triggered
Together, these methods define a hybrid dynamical system as a collection of functions. These functions act on the "context" objects, which are constructed for a particular system and contain the time, state, and parameters of the system. The implication of the consistent interface is that every block can be a hybrid dynamical system, potentially including discrete and continuous dynamics, zero-crossing events, and other features. In the next tutorial we will look more closely at the system interface and how to construct custom blocks.
Configuring simulations¶
You may have noticed that we overrode the default tolerances in the ODE solver by setting options=collimator.SimulatorOptions(rtol=1e-6, atol=1e-8). The defaults are rtol=1e-3 and atol=1e-6, matching the defaults in scipy.integrate.solve_ivp. Let's see what happens if we run the simulation again with the defaults:
diagram = make_oscillator(x0=0.0, v0=0.0, k=10.0)
context = diagram.create_context()
recorded_signals = {
"u": diagram["Step_0"].output_ports[0],
"x": diagram["position"].output_ports[0],
"v": diagram["velocity"].output_ports[0],
"F": diagram["net_force"].output_ports[0],
}
t0, tf = 0.0, 5.0
results = collimator.simulate(
diagram,
context,
(t0, tf),
recorded_signals=recorded_signals,
)
fig, axs = plt.subplots(3, 1, figsize=(7, 5), sharex=True)
axs[0].plot(results.time, results.outputs["x"])
axs[0].set_ylabel("position [m]")
axs[1].plot(results.time, results.outputs["v"])
axs[1].set_ylabel("velocity [m/s]")
axs[2].plot(results.time, results.outputs["u"], label="input")
axs[2].plot(results.time, results.outputs["F"], label="net force")
axs[2].legend(loc="lower right")
axs[2].set_ylabel("force [N]")
collimator:INFO max_major_steps=100 based on smallest discrete period=inf collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=100, ode_solver_method=default, rtol=0.001, atol=1e-06, min_minor_step_size=None, max_minor_step_size=None, zc_bisection_loop_count=40, save_time_series=True, recorded_signals=4, return_context=True), Dopri5Solver(system=Diagram(oscillator, 5 nodes), rtol=0.001, atol=1e-06, max_steps=4096, max_step_size=None, min_step_size=None, method='default', enable_autodiff=False)
Text(0, 0.5, 'force [N]')

Why does the resolution look so poor in the simulation results? In fact, the results are not necessarily inaccurate (at least up to the specified tolerances), but are only reported at the times reached by the adaptive time-stepping in the ODE solver. We can see that by looking at the sampled points directly:
fig, axs = plt.subplots(3, 1, figsize=(7, 5), sharex=True)
(l,) = axs[0].plot(results.time, results.outputs["x"])
axs[0].plot(results.time, results.outputs["x"], ".", color=l.get_color())
axs[0].set_ylabel("position [m]")
(l,) = axs[1].plot(results.time, results.outputs["v"])
axs[1].plot(results.time, results.outputs["v"], ".", color=l.get_color())
axs[1].set_ylabel("velocity [m/s]")
(l,) = axs[2].plot(results.time, results.outputs["u"], label="input")
axs[2].plot(results.time, results.outputs["u"], ".", color=l.get_color())
(l,) = axs[2].plot(results.time, results.outputs["F"], label="net force")
axs[2].plot(results.time, results.outputs["F"], ".", color=l.get_color())
axs[2].legend(loc="lower right")
axs[2].set_ylabel("force [N]")
Text(0, 0.5, 'force [N]')

To understand the sampling, it's helpful to understand a little about the way the hybrid simulation works. The simulation is broken into "major steps", which constitute intervals of time between events, and "minor steps", which are the steps taken by the ODE solver to advance in continuous time. The major steps are determined by the following criteria:
- The end time of the simulation
- Scheduled periodic discrete updates
- Localization of zero-crossing events
- The minimum major step length specified manually in
SimulatorOptions
Within a "major step", the ODE solver may take a number of "minor steps" to advance the continuous state of the system. For example, the simulation steps for a hybrid system with periodic updates might look like the following:

Here the major steps are denoted by thicker black lines on the time axis, while the minor steps are indicated by thinner grey lines. At the boundary of major steps, the system applies the periodic discrete update rules, causing discontinuous jumps in the signal. In terms of the sampled results, the simulation records results for specified ports at (1) the beginning of each major step, and (2) all intermediate minor steps taken by the ODE solver (solid circles in the figure above). The final value of each major step is not recorded, so that there are not duplicate results at a particular time stamp (open circles in the figure above). In the case where there are "zero-crossing" events in the system, the simulation can localize those events in time, leading to additional major steps. We will discuss event handling in more detail in later tutorials.
Returning to the oscillator example, the ODE solver only needs to take relatively coarse steps to accurately resolve the dynamics of the system, so relatively few minor steps are taken away from the single discrete update induced by the step function. In the future, we plan to support for interpolation of the results to arbitrary time points, but in the meantime we can use the SimulatorOptions to get more fine-grained control over the simulation.
The available options can be found in the documentation for simulate:
print(collimator.simulate.__doc__)
Simulate the hybrid dynamical system defined by `system`.
The parameters and initial state are defined by `context`. The simulation time
runs from `tspan[0]` to `tspan[1]`.
The simulation is "hybrid" in the sense that it handles dynamical systems with both
discrete and continuous components. The continuous components are integrated using
an ODE solver, while discrete components are updated periodically as specified by
the individual system components. The continuous and discrete states can also be
modified by "zero-crossing" events, which trigger when scalar-valued guard
functions cross zero in a specified direction.
The simulation is thus broken into "major" steps, which consist of the following,
in order:
(1) Perform any periodic updates to the discrete state.
(2) Check if the discrete update triggered any zero-crossing events and handle
associated reset maps if necessary.
(3) Advance the continuous state using an ODE solver until the next discrete
update or zero-crossing, localizing the zero-crossing with a bisection search.
(4) Store the results data.
(5) If the ODE solver terminated due to a zero-crossing, handle the reset map.
The steps taken by the ODE solver are "minor" steps in this simulation. The
behavior of the ODE solver and the hybrid simulation in general can be controlled
by configuring `SimulatorOptions`. Available settings are as follows:
SimulatorOptions:
enable_tracing (bool): Allow JAX tracing for JIT compilation
max_major_step_length (float): Maximum length of a major step
max_major_steps (int):
The maximum number of major steps to take in the simulation. This is
necessary for automatic differentiation - otherwise the "while" loop
is non-differentiable. With the default value of None, a heuristic
is used to determine the maximum number of steps based on the periodic
update events and time interval.
rtol (float): Relative tolerance for the ODE solver. Default is 1e-6.
atol (float): Absolute tolerance for the ODE solver. Default is 1e-8.
min_minor_step_size (float): Minimum step size for the ODE solver.
max_minor_step_size (float): Maximum step size for the ODE solver.
ode_solver_method (str): The ODE solver to use. Default is "default", which
will use the diffrax Tsit5 solver if JAX tracing is enabled, otherwise the
SciPy Dopri5 solver.
save_time_series (bool):
This option determines whether the simulator saves any data. If the
simulation is initiated from `simulate` this will be set automatically
depending on whether `recorded_signals` is provided. Hence, this
should not need to be manually configured.
recorded_signals (dict[str, OutputPort]):
Dictionary of ports or other cache sources for which the time series should
be recorded. Note that if the simulation is initiated from `simulate` and
`recorded_signals` is provided as a kwarg to `simulate`, anything set here
will be overridden. Hence, this should not need to be manually configured.
return_context (bool):
If the context is not needed for anything, opting to not return it can
speed up compilation times. For instance, typical simulation calls from
the UI don't use the context for anything, so model_interface.py will
set `return_context=False` for performance.
postprocess (bool):
If using buffered results recording (i.e. with JAX numerical backend), this
determines whether to automatically trim the buffer after the simulation is
complete. This is the default behavior, which will serve unless the full
call to `simulate` needs to be traced (e.g. with `grad` or `vmap`).
The return value is a `SimulationResults` object, which is a named tuple containing
all recorded signals as well as the final context (if `options.return_context` is
`True`). Signals can be recorded by providing a dict of (name, signal_source) pairs
Typically the signal sources will be output ports, but they can actually be any
`SystemCallback` object in the system.
Args:
system (SystemBase): The hybrid dynamical system to simulate.
context (ContextBase): The initial state and parameters of the system.
tspan (tuple[float, float]): The start and end times of the simulation.
options (SimulatorOptions): Options for the simulation process and ODE solver.
results_options (ResultsOptions): Options related to how the outputs are
stored, interpolated, and returned.
recorded_signals (dict[str, OutputPort]):
Dictionary of ports for which the time series should be recorded.
Returns:
SimulationResults: A named tuple containing the recorded signals and the final
context (if `options.return_context` is `True`).
Notes:
results_options is currently unused, pending:
https://collimator.atlassian.net/browse/DASH-1350
If `recorded_signals` is provided as a kwarg, it will override any entry in
`options.recorded_signals`. This will be deprecated in the future in favor of
only passing via `options`.
There are multiple ways of causing the simulation to sample results more frequently. As above, we could lower the tolerances, causing the adaptive time-stepping to naturally sample more frequently. A more direct solution is to limit the length of the "minor steps":
t0, tf = 0.0, 5.0
results = collimator.simulate(
diagram,
context,
(t0, tf),
recorded_signals=recorded_signals,
options=collimator.SimulatorOptions(max_minor_step_size=0.1),
)
fig, axs = plt.subplots(3, 1, figsize=(7, 5), sharex=True)
(l,) = axs[0].plot(results.time, results.outputs["x"])
axs[0].plot(results.time, results.outputs["x"], ".", color=l.get_color())
axs[0].set_ylabel("position [m]")
(l,) = axs[1].plot(results.time, results.outputs["v"])
axs[1].plot(results.time, results.outputs["v"], ".", color=l.get_color())
axs[1].set_ylabel("velocity [m/s]")
(l,) = axs[2].plot(results.time, results.outputs["u"], label="input")
axs[2].plot(results.time, results.outputs["u"], ".", color=l.get_color())
(l,) = axs[2].plot(results.time, results.outputs["F"], label="net force")
axs[2].plot(results.time, results.outputs["F"], ".", color=l.get_color())
axs[2].legend(loc="lower right")
axs[2].set_ylabel("force [N]")
collimator:INFO max_major_steps=100 based on smallest discrete period=inf collimator:INFO Simulator ready to start: SimulatorOptions(math_backend=jax, enable_tracing=True, max_major_step_length=None, max_major_steps=100, ode_solver_method=default, rtol=0.001, atol=1e-06, min_minor_step_size=None, max_minor_step_size=0.1, zc_bisection_loop_count=40, save_time_series=True, recorded_signals=4, return_context=True), Dopri5Solver(system=Diagram(oscillator, 5 nodes), rtol=0.001, atol=1e-06, max_steps=4096, max_step_size=0.1, min_step_size=None, method='default', enable_autodiff=False)
Text(0, 0.5, 'force [N]')

This does not force the simulation to sample at exactly the specified rate, but limits the maximum $\Delta t$ taken by the ODE solver. Until results interpolation is fully supported, uniform sampling can be achieved by manually interpolating the solution, e.g.
t = np.linspace(t0, tf, 100)
x = np.interp(t, results.time, results.outputs["x"])
v = np.interp(t, results.time, results.outputs["v"])
u = np.interp(t, results.time, results.outputs["u"])
F = np.interp(t, results.time, results.outputs["F"])
fig, axs = plt.subplots(3, 1, figsize=(7, 5), sharex=True)
(l,) = axs[0].plot(t, x)
axs[0].plot(t, x, ".", color=l.get_color())
axs[0].set_ylabel("position [m]")
(l,) = axs[1].plot(t, v)
axs[1].plot(t, v, ".", color=l.get_color())
axs[1].set_ylabel("velocity [m/s]")
(l,) = axs[2].plot(t, u, label="input")
axs[2].plot(t, u, ".", color=l.get_color())
(l,) = axs[2].plot(t, F, label="net force")
axs[2].plot(t, F, ".", color=l.get_color())
axs[2].legend(loc="lower right")
axs[2].set_ylabel("force [N]")
Text(0, 0.5, 'force [N]')

We will revisit many of the simulation options in later tutorials as we explore more advanced features of hybrid modeling and simulation in Collimator.